はじめに
以前、各種リモコン操作のChatOpsや、自動ファブリーズなどを紹介したことがありました。今回もラズパイを使ってある家事を機械で制御してみたいと思います。
表題にもある通り今回自動化するのはカーテンの開閉です。具体的にはラジコンを前転・後転で操作することでカーテンを開閉させてみたいと思います。DCモーターを操作するだけで大丈夫そうなので、自動ファブリーズの時とほぼ同様な知識で問題ないかと目論んでいます。
使う物
- Raspberry Pi Zero W
- WiFi機能付きラズパイ
- タミヤ 楽しい工作シリーズ No.108
- DCモーターラジコン
- TB6612 DCモータードライブ
- ブレッドボード
- 外部電源(3v)
- 導線とかはんだとか
ラズパイ設定
以前使用したrasbian OSを使用します。ラズパイ ZeroのUSB端子はmicroしか無く市販のマウス・キーボードを挿せないので、最初にNWやssh接続の設定をしておいた方が楽です。ドライブ直下のディレクトリに空のsshファイルとwpa_supplicant.confファイルを作成します。
何も書かないctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
country=JP
network={
ssid="接続したいSSID"
psk="SSIDのパスワード"
}OS imageファイルの用意が終わったら、SDカードをラズパイに挿して電源を入れます。しばらく待って別端末からssh出来たらOKです。
$ ssh pi@raspberrypi.local
$ password: raspberryDCモーターを制御する
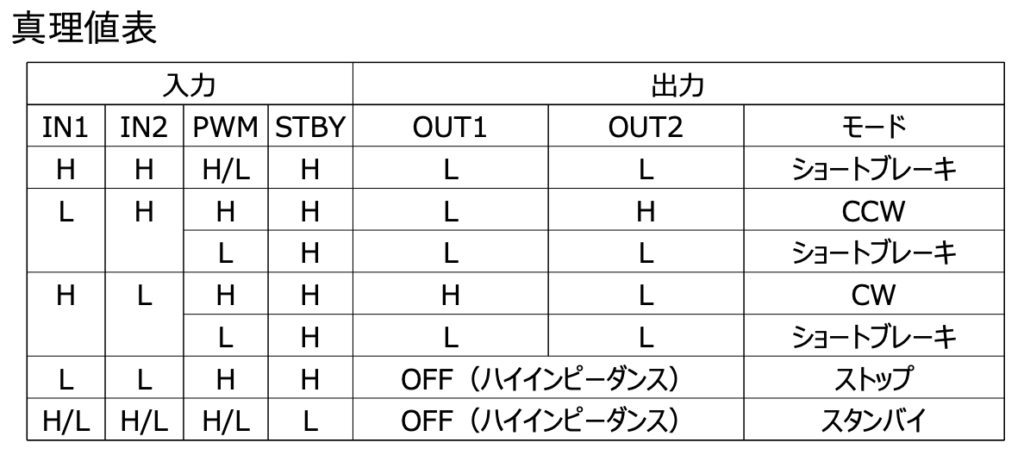
まずはラジコンを前後に動かすためにモーターを制御します。今回はTB6612を使いますが、以前モータードライバーを使用した時とほとんど同じです。違いはモーターを2個使用できる点ですが、前転・後転のみなのでモーターは一個で十分です。TB6612の真理値は下記の通りです。使うのはCCWとCW(正転・逆転)の2つだけです。
下記画像のAO1とAO2にDCモーターを、PGNDとVMに外部電源(3.0V)を繋ぎます。
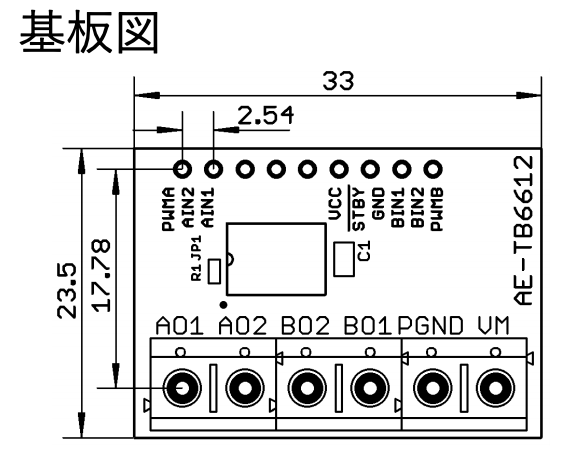
回路は次の通りです。
- +6
- ラズパイ2番(5V)
- g2
- ラズパイ17番↔︎AIN2
- g3
- ラズパイ27番↔︎AIN1
- 緑枠
- TB6612
回路を組んだらラズパイでモーターを制御してみます。
$ gpio -g write 17 0
$ gpio -g write 27 0
$ gpio -g mode 17 out
$ gpio -g mode 27 out
$ gpio readall
+-----+-----+---------+------+---+-Pi ZeroW-+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| | | 3.3v | | | 1 || 2 | | | 5v | | |
| 2 | 8 | SDA.1 | IN | 1 | 3 || 4 | | | 5v | | |
| 3 | 9 | SCL.1 | IN | 1 | 5 || 6 | | | 0v | | |
| 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 0 | IN | TxD | 15 | 14 |
| | | 0v | | | 9 || 10 | 1 | IN | RxD | 16 | 15 |
| 17 | 0 | GPIO. 0 | OUT | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 |
| 27 | 2 | GPIO. 2 | OUT | 0 | 13 || 14 | | | 0v | | |
| 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 |
| | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 |
| 10 | 12 | MOSI | IN | 0 | 19 || 20 | | | 0v | | |
| 9 | 13 | MISO | IN | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 |
| 11 | 14 | SCLK | IN | 0 | 23 || 24 | 1 | IN | CE0 | 10 | 8 |
| | | 0v | | | 25 || 26 | 1 | IN | CE1 | 11 | 7 |
| 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
| 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | |
| 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
| 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | |
| 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
| 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
| | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+-Pi ZeroW-+---+------+---------+-----+-----+上の状態で、17か27をHIGHにするとDCモーターが回ります。HIGH/LOWの組み合わせを逆にすると逆回りになります。前後転の制御が出来てしまえば残りはいうまでもないかと思います。